

机器视觉软件是检测系统中的智能部分,也是最核心的部分。软件的选择决定了你编写调试检测程序的时间、检测操作的性能等等。
工业机器人的眼睛视觉系统通常由以下构成:
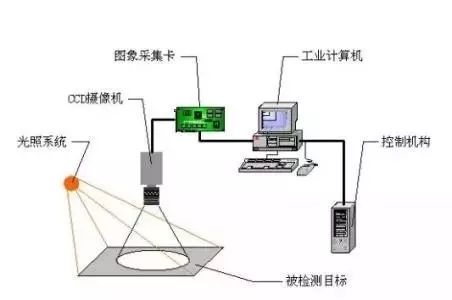
1.摄像头和光学部件
这一类通常含有一个或多个摄像头和镜头(光学部件),用于拍摄被检测的物体。根据应用,摄像头可以基于如下标准,黑白、复合彩色(Y/C),RGB彩色,非标准黑白(可变扫描),步进扫描(progressive-scan)或线扫描。
2. 灯光
灯光用于照亮部件,以便从摄像头中拍摄到更好的图像,灯光系统可以在不同形状、尺寸和亮度。一般的灯光形式是高频荧光灯、LED、白炽灯和石英卤(quartz-halogen)光纤。
3. 部件传感器
通常以光栅或传感器的形式出现。当这个传感器感知到部件靠近,它会给出一个触发信号。当部件处于正确位置时,这个传感器告诉机器视觉系统去采集图像。
4. 图像采集卡
也称为视频抓取卡,这个部件通常是一张插在 PC上的卡。
这张采集卡的作用将摄像头与 PC连接起来。它从摄像头中获得数据(模拟信号或数字信号),然后转换成PC 能处理的信息。
它同时可以提供控制摄像头参数(例如触发、曝光时间、快门速度等等)的信号。图像采集卡形式很多,支持不同类型的摄像头,不同的计算机总线。
5. PC平台
计算机是机器视觉的关键组成部分。应用在检测方面,通常使用 Pentium或更高的 CPU。一般来讲,计算机的速度越快,视觉系统处理每一张图片的时间就越短。
由于在制造现场中,经常有振动、灰尘、热辐射等等,所以一般需要工业级的计算机。
6. 检测软件
机器视觉软件用于创建和执行程序、处理采集回来的图像数据、以及作出“通过/失败(PASS/FAIL)”决定。
机器视觉有多种形式(C 语言库、ActiveX 控件、点击编程环境等等),可以是单一功能(例如设计只用来检测 LCD或 BGA、对齐任务等等),也可以是多功能(例如设计一个套件,包含计量、条形码阅读、机器人导航、现场验证等等)。
7. 数字 I/O和网络连接
一旦系统完成这个检测部分,这部分必须能与外界通信,例如需要控制生产流程、将“通过/失败(PASS/FAIL)”的信息送给数据库。通常,使用一张数字 I/O板卡和(或)一张网卡来实现机器视觉系统与外界系统和数据库的通信。
配置一个基于 PC的机器视觉系统认真的计划和注意细节能帮助你确保你的检测系统符合你的应用需求。如下是你必需考虑的几点:

确定目标,最重要的一步决定在这个检测任务中需要实现什么,检测任务通常分为如下几类:
测量或计量,
读取字符或编码(条形码)信息,
检测物体的状态,
认知和识别特殊的特性 模式识别,
将物体与模板进行对比或匹配,
为机器或机器人导航检测流程可以包含只有一个操作或包含多个与检测任务相关的任务。
聪明地选择硬件
一套机器视觉系统的性能与它的部件密切相关。在选择的过程中,有很多捷径特别在光学成像上可能很大程度降低系统的效率。在选择部件时必须紧记的几个基本原则。
1. 摄像头的选择与应用的需求直接相关,通常考虑三点:
a)黑白还是彩色;
b)部件/目标的运动;
c)图像分辨率。
2.光学部件和照明这个至关重要的因素往往被人所忽略。
3.图像采集卡只是完整的机器视觉系统的一个部件,但是它扮演一个非常重要的角色。
机器视觉软件是检测系统中的智能部分,也是最核心的部分。软件的选择决定了编写调试检测程序的时间、检测操作的性能等等。
为机器视觉系统选择部件时,时刻记住未来的生产所需和有可能发生的变动。这些将直接影响机器视觉软硬件是否容易更改,来满足以后新的任务,合理配置系统就可以建造一个零故障和有弹性的视觉检测系统。
























